
Quem opera uma linha de montagem sabe que o maior inimigo da precisão não é a velocidade, mas a vibração. O impacto seco de uma garra robótica industrial ao entrar em contato com uma peça gera microfissuras e fadiga de material que, a longo prazo, resultam em paradas não planejadas. Recentemente, uma abordagem disruptiva abandonou as molas mecânicas tradicionais em favor de um sistema de amortecimento por repulsão magnética.
O Fim do Impacto Seco na Automação
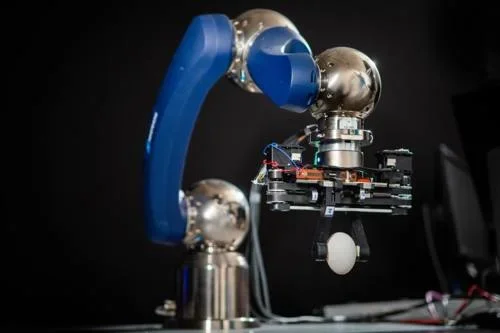
Diferente dos sistemas pneumáticos que podem apresentar atrasos de resposta, as garras para robô industrial equipadas com ímãs de neodímio configurados em oposição criam um colchão invisível de força. Na prática, quando a garra se aproxima do objeto, a resistência aumenta exponencialmente sem que haja contato físico entre as partes móveis do amortecedor. Isso é o que chamamos de conformidade passiva inteligente.
Em cenários de alta cadência, essa tecnologia resolve o problema crônico do 'rebote'. Quando uma garra robotica industrial convencional fecha rápido demais, ela tende a quicar, o que pode deslocar componentes eletrônicos sensíveis ou marcar superfícies polidas. O magnetismo absorve essa energia cinética residual de forma linear e previsível.
O Desafio da Garra Robótica de Papelão
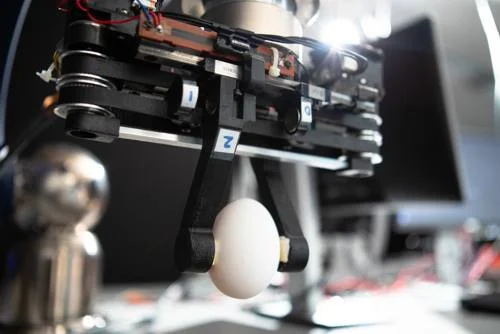
Um dos setores que mais se beneficia dessa inovação é o de embalagens. O manuseio de caixas exige uma garra robótica de papelão que seja firme o suficiente para não deixar a carga cair, mas suave o bastante para não esmagar as fibras do material. O uso de uma pinça magnética adaptada com sensores de torque e amortecimento por ímãs permite que o robô 'sinta' a resistência do papelão antes mesmo de aplicar a força total de fechamento.
Durabilidade e Manutenção Preditiva
No chão de fábrica, a substituição de molas e elastômeros é uma tarefa constante. Esses componentes sofrem degradação térmica e química. Já os sistemas magnéticos não possuem fadiga mecânica da mesma forma. Ao implementar essa tecnologia, a necessidade de manutenção e reforma dos braços robóticos diminui drasticamente, pois o estresse transmitido para as juntas do robô é filtrado pelo campo magnético.
Engenheiros que testaram essa configuração relatam que a vida útil dos servomotores da garra robotica de papelao aumentou em até 30%, simplesmente porque o motor não precisa lutar contra picos de torque gerados por colisões bruscas. É uma solução de engenharia que prioriza a física em vez da força bruta.
Dúvidas Frequentes (FAQ)
Como os ímãs conseguem absorver choques em robôs?
O campo magnético da garra pode interferir na carga?
Qual a vantagem de usar ímãs em vez de molas tradicionais?
Essa tecnologia funciona para qualquer garra industrial?

Rafael Ribeiro
CEO Técnico

